Yuchu新型AI模型赋予机器人常识
开源AI大脑让机器人更聪明

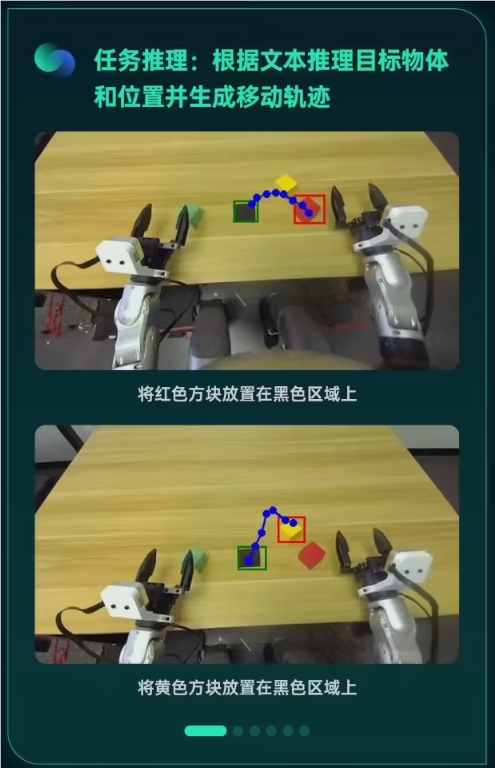
想象一个不仅能盲目遵循指令,还能理解物体在空间中如何移动的机器人——知道抓握杯子的哪个位置不会滑落,开门时该用多大的力道。这正是Yuchu新推出的UnifoLM-VLA-0模型为人形机器人带来的能力。
从屏幕智能到街头智慧
重大突破何在?这不是另一个仅通过文本来假装理解世界的聊天机器人。UnifoLM-VLA-0真正掌握了物理现实:
- 空间直觉:像人类本能那样将文本指令与3D环境对齐
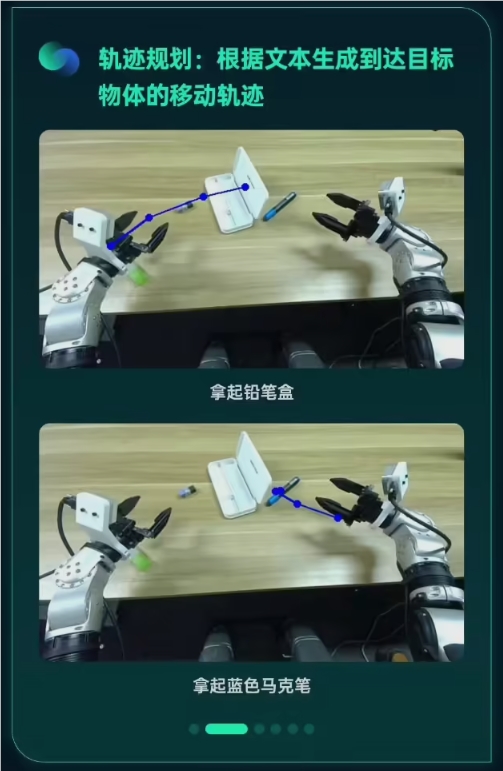
- 动作规划:在考虑真实世界物理规律的同时预测动作序列
- 适应性:即使在任务中被碰撞或打断也能保持稳定
巧构而非蛮建
Yuchu并未从零开始。他们在阿里巴巴Qwen2.5-VL模型的坚实基础上进行了强化:
- 仅用340小时真实机器人数据训练——对此类能力而言出奇高效
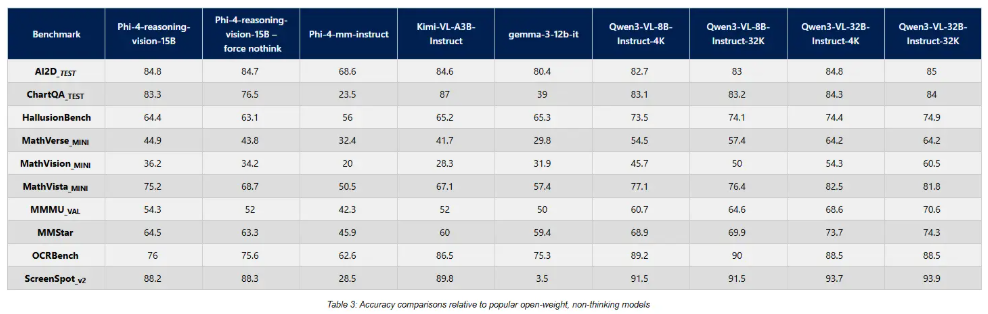
- 在空间推理测试中显著超越其父模型
- 在某些场景下直逼谷歌Gemini-Robotics
秘诀何在?一个专注于物理交互而非抽象知识的精细清洗数据集。
真实世界的机器人验证
橡胶与路面相遇于Yuchu的G1人形平台,在这里UnifoLM-VLA-0能够处理:
- 精确物体操控(不再笨手笨脚打翻咖啡杯!)
- 无需重新编程的复杂多步骤任务
- 意外干扰而不会导致灾难性失败
关键要点:
- 开放获取:完整模型现已发布于GitHub供全球开发者使用
- 物理智能:标志着从纯认知到具身理解的转变
- 商业潜力:可能加速服务机器人的实际应用
- 社区益处:开源方式邀请全球协作开发机器人大脑