机器人现可抓握玻璃器皿,得益于突破性深度感知技术
机器人终于掌握处理玻璃器皿的技巧
是否曾目睹机器人笨拙地摆弄酒杯?这种令人沮丧的限制可能即将成为历史。蚂蚁集团灵波科技刚刚发布了LingBot-Depth——一个开源的空间感知模型,赋予机器极其精确的视觉能力,尤其在处理棘手的透明和反光物体方面。
看穿无形之物
这一突破来得正是时候。随着机器人从工厂走进家庭和医院,它们无法可靠地处理玻璃器皿、镜面和不锈钢设备的问题一直是个持续障碍。传统深度相机在光线穿过或从闪亮表面反射时常常失效。
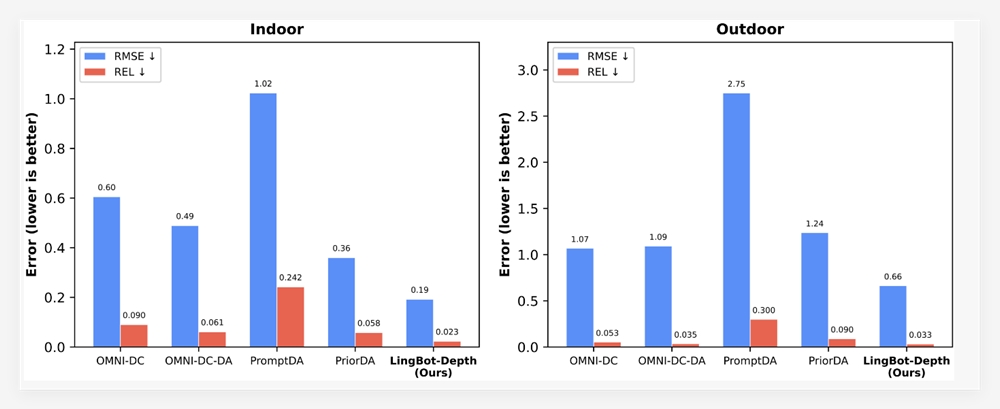
说明:LingBot-Depth(最右侧)在稀疏深度补全任务中优于现有模型
"这就像给机器人装上X射线视觉一样,"项目首席研究员张伟博士解释道,"传统系统看到的是玻璃物体的空白或噪点,而我们的模型通过分析纹理线索和上下文信息重建完整的3D形状。"
秘诀何在?一种名为掩蔽深度建模(MDM)的创新方法,它能利用彩色图像线索智能填补缺失的深度数据。搭配Orobote的Gemini330立体相机后,该系统实现了工程师们曾认为不可能的事——获取透明表面的精确深度图。
精度实测
在与行业领先方案的正面比较中:
- 相比标准解决方案减少室内场景误差达70%
- 将稀疏重建误差降低近一半(提升47%)
- 即使在强背光和复杂曲线条件下仍保持清晰度
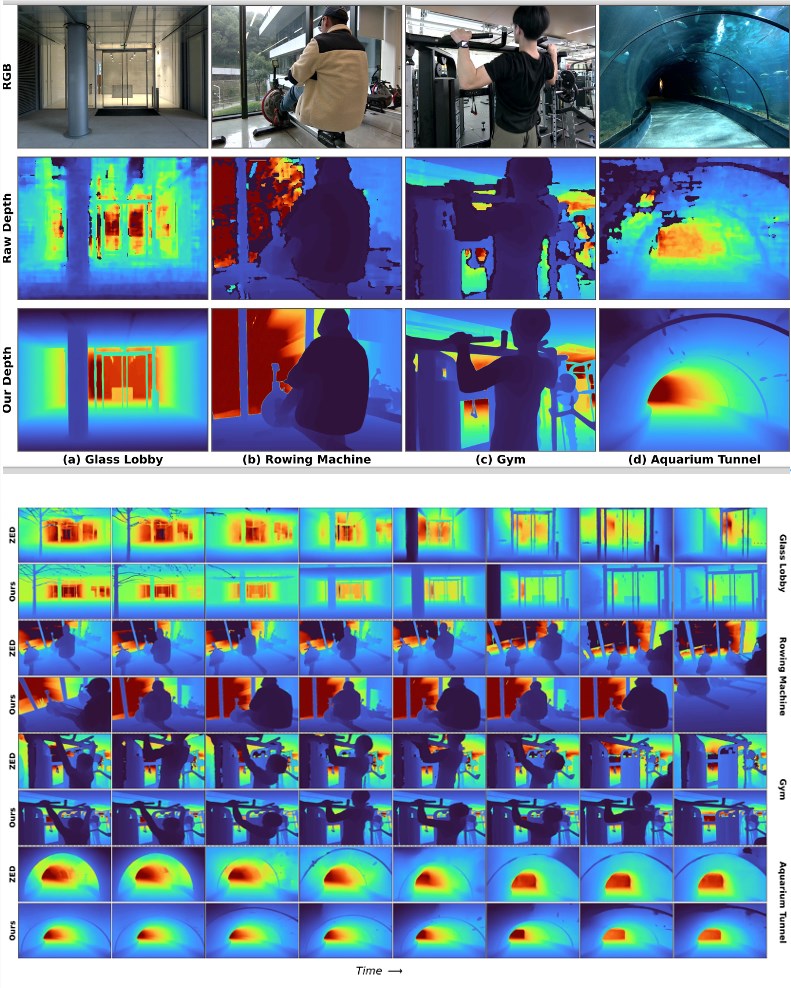
说明:上图-LingBot-Depth重建玻璃表面;下图-超越ZED Stereo Depth的表现
其影响远不止于处理易碎物品。自动驾驶车辆可以更好地检测湿滑路面或冰面;工业机器人或许能在无需昂贵传感器的情况下安全操作闪亮的机械部件。
开放资源闸门
在企业研究中采取不寻常举措的是,蚂蚁灵波不仅开源了模型还包括:
- 200万真实世界深度数据集
- 100万模拟训练样本
- 完整的集成文档
这些数据宝藏代表了六个月来在全球家庭、工厂和实验室进行的密集实地采集成果。
该公司还宣布计划推出专为LingBot-Depth处理优化的下一代Orobote相机——可能比预期更早地将这种先进视觉技术带入消费级机器人领域。
关键要点:
- 通过创新深度建模解决机器人学的"玻璃难题"
- 在精度测试中超越现有方案高达70%
- 大规模数据集发布加速行业采用
- 即将登陆专用立体相机
- 开源方法或将普及先进机器视觉