Robots Learn Like Humans: New AI Model Understands Tasks by Events, Not Frames
Robots Start Thinking in Events, Not Just Movements
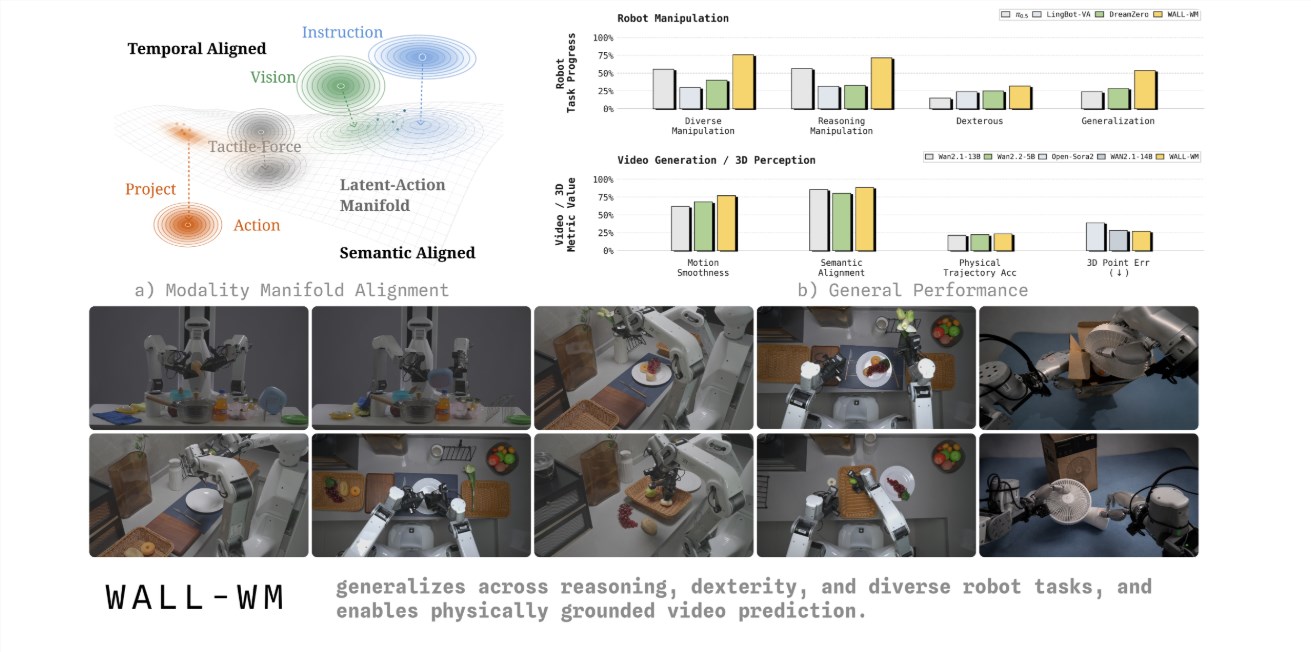
The robotics world just took a significant leap forward with the introduction of WALL-WM, a new artificial intelligence model that learns tasks the way humans do - by understanding meaningful events rather than memorizing countless individual movements. Developed by the Variable Robot team, this innovation could finally help robots move beyond their current limitations in performing complex tasks.

The Problem With Current Robot Learning
Until now, most vision-language-action (VLA) models have operated by analyzing one frame at a time - like watching a movie frame by frame instead of seeing the whole story. This approach forces robots to learn through endless repetition of minor physical movements, often missing the bigger picture of what they're actually trying to accomplish.
"Imagine teaching someone to make coffee by having them memorize every tiny hand movement," explains one researcher familiar with the project. "If you change the coffee mug or move the sugar bowl, their carefully memorized movements become useless. That's essentially how today's robots learn - and why they often struggle with simple changes in their environment."
How WALL-WM Changes the Game
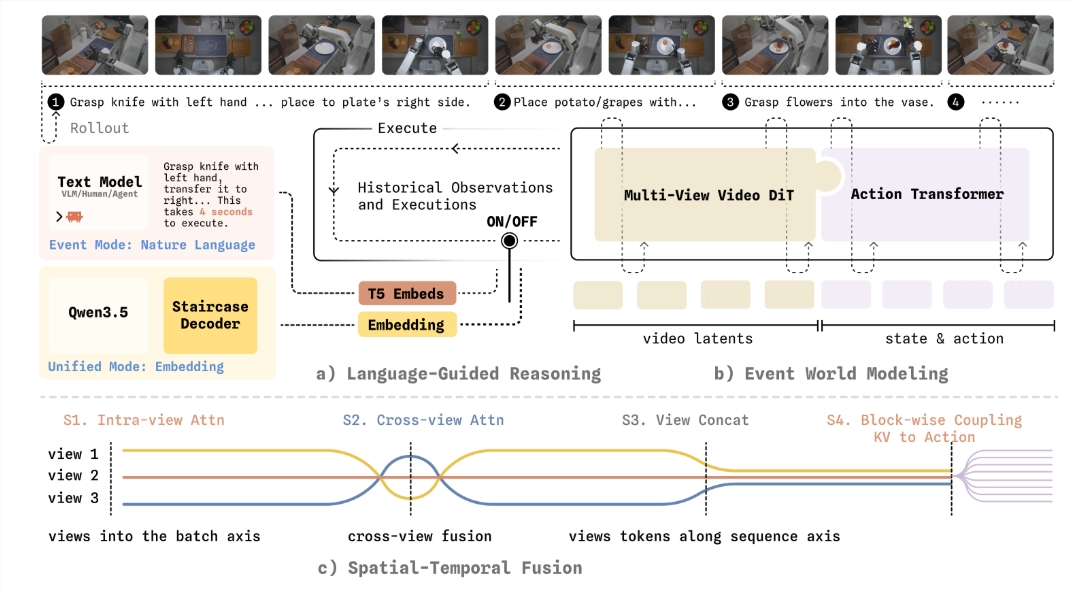
The new model takes a radically different approach by breaking tasks down into meaningful events with clear purposes - "reach for the cup," "grasp the handle," "pour the liquid" - rather than focusing on individual frames of movement. It's the difference between memorizing dance steps and understanding that you're performing a waltz.
Here's how it works in practice:
- The robot first simulates how the next event will change its environment
- It then translates that projected change into precise arm movements
- The system continuously updates its understanding based on actual results
This event-based learning comes with several advantages. Robots can better adapt to changes in their environment, transfer skills between similar tasks, and even predict potential problems before they occur. Early tests show particularly promising results in kitchen environments, where objects frequently change position and orientation.
The Engineering Behind the Breakthrough
Making this theoretical approach work in the physical world required some clever engineering solutions. The Variable team developed a system that can switch between event-based planning and real-time adjustments on the fly, much like a human might alternate between planning a route and making small steering corrections while driving.
They also tackled several technical challenges:
- Preventing the system from losing valuable visual information when learning movements
- Improving 3D spatial awareness across multiple camera views
- Reducing decision-making delays through "stepped thinking chain decoding"
The result is a robot that doesn't just follow pre-programmed motions, but actually understands what it's trying to accomplish - a crucial step toward truly intelligent machines that can operate reliably in our unpredictable human world.
Key Points:
- Event-based learning: WALL-WM understands tasks as sequences of meaningful events rather than individual movements
- Better adaptation: Robots can handle changes in their environment more effectively
- Real-world ready: The system includes mechanisms for both planning and real-time adjustment
- Technical innovations: Includes solutions for 3D perception and decision-making speed
- Human-like learning: Mirrors how people understand and perform complex tasks