机器人像人类一样学习:AI训练领域的颠覆性飞跃
机器人终于像人类一样学习了
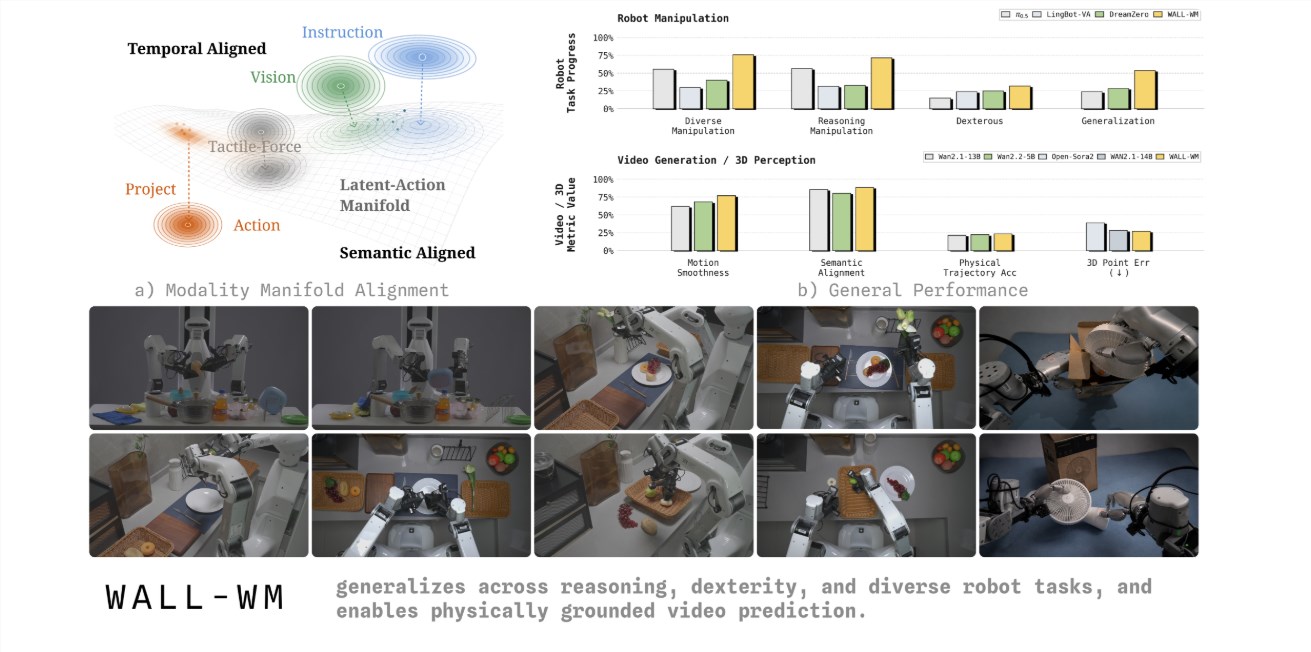
Variable Robot推出的WALL-WM可能标志着人工智能发展的根本性转变——这是首个通过语义事件而非艰苦的逐帧分析来学习的具身智能模型。这项于5月29日公布的突破性成果,终于弥合了机器与人类理解任务方式之间的鸿沟。

当前机器人学习的局限性
现今的机器人通常通过视觉-语言-动作(VLA)模型学习,这些模型根据当前图像和指令预测固定动作区块。这就像教孩子写字时让他们反复描摹笔画却不理解词义。结果如何?机器人或许能完美执行练习过的动作,但面对细微变化——比如拿起形状不同的杯子时——就完全无能为力。
"现有方法强制对齐本质上不存在关联的元素,"Variable团队的研究论文解释道,"现实中文本、视觉和动作信息本就存在于不同的时间尺度。"
以事件而非帧为单位思考
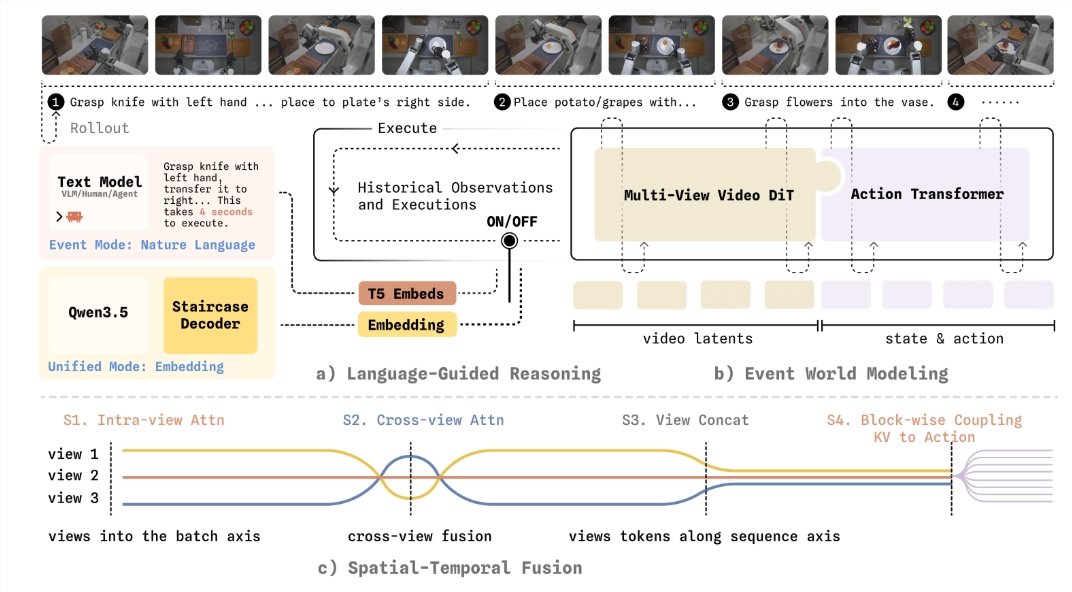
WALL-WM的革命性方法将任务分解为有意义的事件——接近、抓取、移动——就像人类概念化动作的方式。该模型不是计算机械臂的下个位置,而是先模拟每个事件后世界将如何变化,再将预测转化为动作。
背后的工程突破
实现这一概念飞跃需要多项技术创新:
- 双模式灵活性:同一系统可在基于事件的变长动作与传统实时控制间切换
- 保护式学习:来自网络视频的关键视觉动态不受动作数据偏见影响
- 3D感知:先进的遮罩技术强制实现跨摄像机视角的真实三维理解
- 更快决策:'阶梯式思维链解码'在保持推理透明度的同时减少延迟
这对机器人未来意味着什么
这种基于事件的方法可能最终使机器人能像人类一样灵活适应新情境。想象一下,家庭助手可以从清洗一个盘子泛化到处理整套瓷器,或是工业机器人能无缝适应生产线变化。
关键要点:
- WALL-WM通过语义事件而非逐帧分析进行学习
- 解决了当前机器人技术中的关键泛化问题
- 保持双操作模式以确保灵活性
- 融合多项工程创新以实现实际场景性能
- 或将彻底改变机器人学习和适应新情境的方式